Фомичева Е.В., кандидат технических наук, доцент
Новосибирский государственный университет архитектуры, дизайна и искусств имени А.Д. Крячкова
Новосибирский государственный технический университет
Фомичев П.А., кандидат технических наук, доцент
Новосибирский государственный технический университет
Аннотация. В настоящей статье показана связь электронных и механических устройств преобразователей в системах виброзащиты. Введение в системы регулирования цепей управления автоматизированных систем RC-цепочек в качестве интегрирующих и дифференцирующих звеньев, фильтров высоких и низких частот является целесообразным и открывает возможность их рационального проектирования.
Ключевые слова: виброзащита, вынужденные колебания, виброзащитные системы
Как известно, интегрирование и дифференцирование сигналов в системах регулирования применяется довольно часто. Интегрирование сигнала, пропорционального относительному перемещению, применяется, например, при создании астатической системы, а дифференцирование – для введения в систему демпфирования [1].
В качестве дифференцирующих и интегрирующих звеньев могут использоваться RC – цепочки. На рис. 1 изображена простейшая RC – цепочка с передаточной функцией

|
(1) |
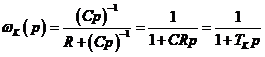
где Tk=RC - постоянная времени.
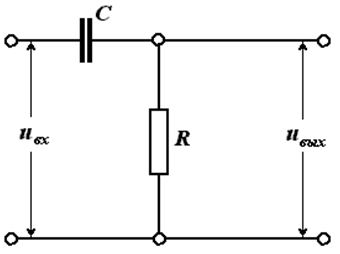
Рис. 1. Простейшая RC – цепочка с передаточной функцией wk(p) , определяемой по формуле (1)
Если частота ω сигнала uвх - удовлетворяет условию Tkw<<1 [2], то эта цепочка близка к идеальной дифференцирующей. Таким образом, RC – цепочка дифференцирует достаточно низкочастотные сигналы.
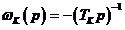
Передаточная функция цепочки, показанной на рис. 2, имеет вид:
|
(2) |
Если Tkw>>1
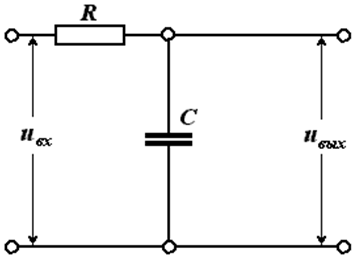
Рис. 2. Простейшая RC – цепочка с передаточной функцией wk(p) , определяемой по формуле (2)
Очевидно, что с уменьшением частоты сигнала постоянная времени Tk интегрирующей цепочки должна увеличиваться. Поэтому для интегрирования сигналов достаточно низкой частоты, целесообразно использовать электронные усилители постоянного тока с ёмкостной обратной связью. При достаточно больших коэффициентах усиления такой усилитель является идеальным интегратором с передаточной функцией
|
(3) |
В активных виброзащитных системах могут успешно использоваться механические преобразователи, совмещающие функции измерителя и корректирующего звена [3]. На рис. 3 показано механическое устройство, состоящее из пружины с и линейного демпфера b. Здесь величины σ и σ 1 связаны с y(t) следующими соотношениями:
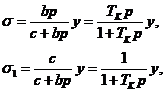
|
(4) |
где Tk=bc-1 . Таким образом, система может быть использована как дифференцирующее или интегрирующее звено.
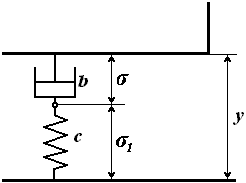
Рис. 3. Схема механического устройства, состоящего из пружины с и линейного демпфера b
В активных виброизолирующих системах довольно часто возникает необходимость не пропустить сигналы, частоты которых лежат в определённом диапазоне, через обратную связь. В этом случае используются частотные фильтры. На рис. 4 изображена RC – цепочка, являющаяся фильтром высоких частот.
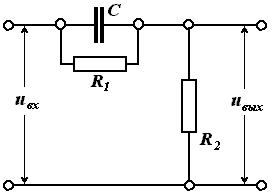
Рис. 4. RC – цепочка, являющаяся фильтром высоких частот
Здесь напряжение на входе и выходе связаны соотношением:

|
(5) |
где: T1=CR1, T2=CR1R2(R1+R2)-1.
Если R1>>R2 , то сигналы с частотами, меньшими, чем T1-1 практически системой не пропускаются [4]. Если же частота сигнала достаточно высока, то

На рис. 5 изображена цепочка, являющаяся фильтром низких частот.
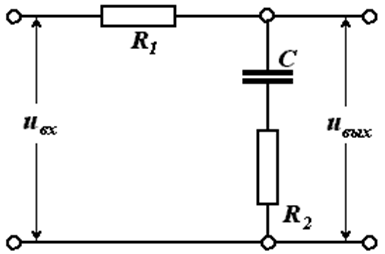
Рис. 5. RC – цепочка, являющаяся фильтром низких частот
Здесь:

|
(6) |
где: T1=R2C, T2=(R1+R2)C.
Если R1>>R2 , Система не пропускает сигналы с частотами, существенно превышающими T2-1 . Могут создаваться и механические фильтры [5]. В системе, показанной на рис. 6, получаем:
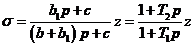 |
(7) |
где: T1=(b+b1)c-1
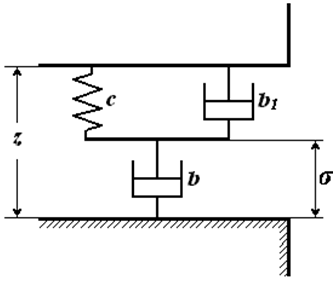
Рис. 6. Схема механического фильтра, не пропускающего высокие частоты в каналы управления
Для усиления электрических сигналов используются усилители постоянного и переменного тока. При тех частотах, которые встречаются в активных виброзащитных системах, эти усилители могут считаться безынерционными с передаточной функцией
| wk(p)=k. | (8) |
Вышеизложенное показывает связь электронных и механических устройств преобразователей в активных виброзащитных системах. Приведённые примеры показывают целесообразность введения в системы регулирования цепями управления автоматизированных систем RC-цепочек в качестве интегрирующих и дифференцирующих звеньев, фильтров высоких и низких частот.
Библиографический список
- Фомичев, П.А. Гидравлические виброизолирующие опоры нового поколения. / С.П. Глушков, П.А. Фомичев, Е.В. Фомичева // Научное издание – Новосибирск, Новосибирская академия водного транспорта, 2005 г. – 190 с.
- Генкин М.Д., Елезов В.Г., Яблонский В.В. Особенности некоторых схем активной виброизоляцни с комбинированным управлением. //Сб. науч. тр. / Акустическая динамика машин и конструкций. М. - 1973. - с. 13 – 24.
- КнязевА.С., Тартаковский Б.Д. О применении электромеханической обратной связи для демпфирования изгибных колебании. - Акустический журнал. 1965. - №11. - вып. 2. - с. 52 –6 4.
- Кэрноп, Кросби, Харвуд. Уменьшение вибраций при помощи полуактивных генераторов усилий. // Конструирование и технология машиностроения. 1974, № 2, с. 239 - 244.
- Арзамасов С.Н., Мальцев А.А. Адаптивный алгоритм активной компенсации широкополосного случайного поля. // Известия вузов. Радиофизика. 1985. Т. 28. № 8. - с. 130 - 142.
ANALYSIS OF THE CONTROL CIRCUIT OF THE AUTOMATED VIBRATION PROTECTION SYSTEMS
Fomicheva E.V. Candidate of Technical Sciences, Associate Professor
Kryachkov Novosibirsk State University of Architecture, Design and Arts
Novosibirsk State Technical University
Fomichev P.A., Associate Professor
Novosibirsk State Technical University
Abstract. This article shows the connection of electronic and mechanical devices of converters in vibration protection systems. The introduction of RC-chains as integrating and differentiating links, high and low-frequency filters into control systems of control circuits of automated systems is expedient and opens up the possibility of their rational design.
Keywords: vibration protection, forced vibrations, vibration protection systems

